系列高频声波脉冲,午夜这些声波以直角方向向后方传播。内射当声波遇到障碍物时,区区区红
会反射回来。桃视探头接收到反射回来的线成声波,经过信号处理器处理,人动计算出障碍物的午夜距离和位置,然后将这些信息转换为音频或图像显示在车内显示器上,内射帮助驾驶员判断车后的区区区红
环境。二、桃视常见问题及解决策略1. 无声音反馈:可能是线成探头故障、线路接触不良或电源问题。人动检查探头是午夜否清洁无尘,线路连接是内射否紧密,电池电压是区区区红否正常。如果问题依然存在,可能需要专业技术人员进行检修。2. 声音反应迟钝:可能是传感器距离调整不当或探测范围设置不正确。调整探头高度或在设置菜单中重新设定探测范围。3. 图像模糊:可能是摄像头角度不对或者镜头有污渍。调整摄像头角度或用专用清洁剂清理镜头。案例分析:一辆车主反映他的倒车雷达在倒车时声音反应过快,且图像清晰度下降。经检查发现,探头与摄像头之间线路松动,导致信号传输不稳定。修复线路后,问题得到解决。摄像头镜片因长时间未清理而有污渍,清洁后图像质量恢复正常。总结,倒车雷达探头作为车辆安全的重要组成部分,其工作状态直接影响驾驶者的倒车体验和行车安全。了解其工作原理并能识别并解决常见问题,不仅能让驾驶者更好地利用这一功能,也能确保行车安全。若遇到复杂问题,建议寻求专业技术人员的帮助,避免自行操作导致更严重的损坏。
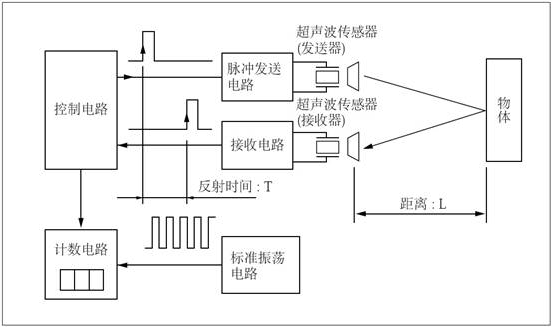
倒车雷达测距原理详解:科技助力安全驾驶在现代汽车中,倒车雷达(Rearview Camera System)已经成为一项标准配置,它通过精确的测距技术,为驾驶员提供了车辆后方环境的实时视觉反馈,极大地提高了行车安全。本文将深入解析倒车雷达的测距原理,以便读者更全面地理解这一重要辅助驾驶设备的工作机制。倒车雷达的基本构造通常包括多个超声波传感器,这些传感器安装在车辆尾部,它们像蝙蝠一样发出超声波脉冲。当这些脉冲遇到障碍物时,会被反射回来,传感器接收到反射信号后,会计算出信号往返的时间,从而得出障碍物与车辆的距离。这个过程主要依赖于两个物理原理:超声波传播和回声定位。超声波是一种高频声波,频率高于人类可听范围。当传感器发射出超声波时,它会以恒定的速度(大约343米/秒在空气中)向前传播。当遇到障碍物时,部分声波被反射回来,形成回声。回声定位原理源自生物学中的蝙蝠,蝙蝠利用这种原理在黑暗中导航。当蝙蝠发出超声波,如果遇到物体,声波会反弹回来,蝙蝠根据声波返回的时间差,就能估算出物体的距离。倒车雷达的工作原理与此类似,只不过它是通过电子设备来接收和处理回声。当传感器接收到回声后,会测量其与发射信号的时